Hi, I'm Kofi
Welcome! Glad to have you here!
A passionate robotic enthusiast
About Me
Hello! My name is Kofi (the "Ko" is pronounced like "Koe-Fee". My name is not coffee/cafe. Yes, I have heard both😅). I'm a recent Electrical and Computer Engineering graduate from Cornell University with a strong interest in robotics, embedded systems, automation, and control systems.
I'm also looking to branch into cloud and networks if any opportunity allows. You can find some of my projects on my GitHub profile.
I'm always looking for new challenges and opportunities to learn and grow my skills. Apart from the technical route, I like to dabble in photography, video editing, and languages. I'm learning to animate in 3D as well:)
PDF Preview is best on desktop.
View Full ResumeMy Projects
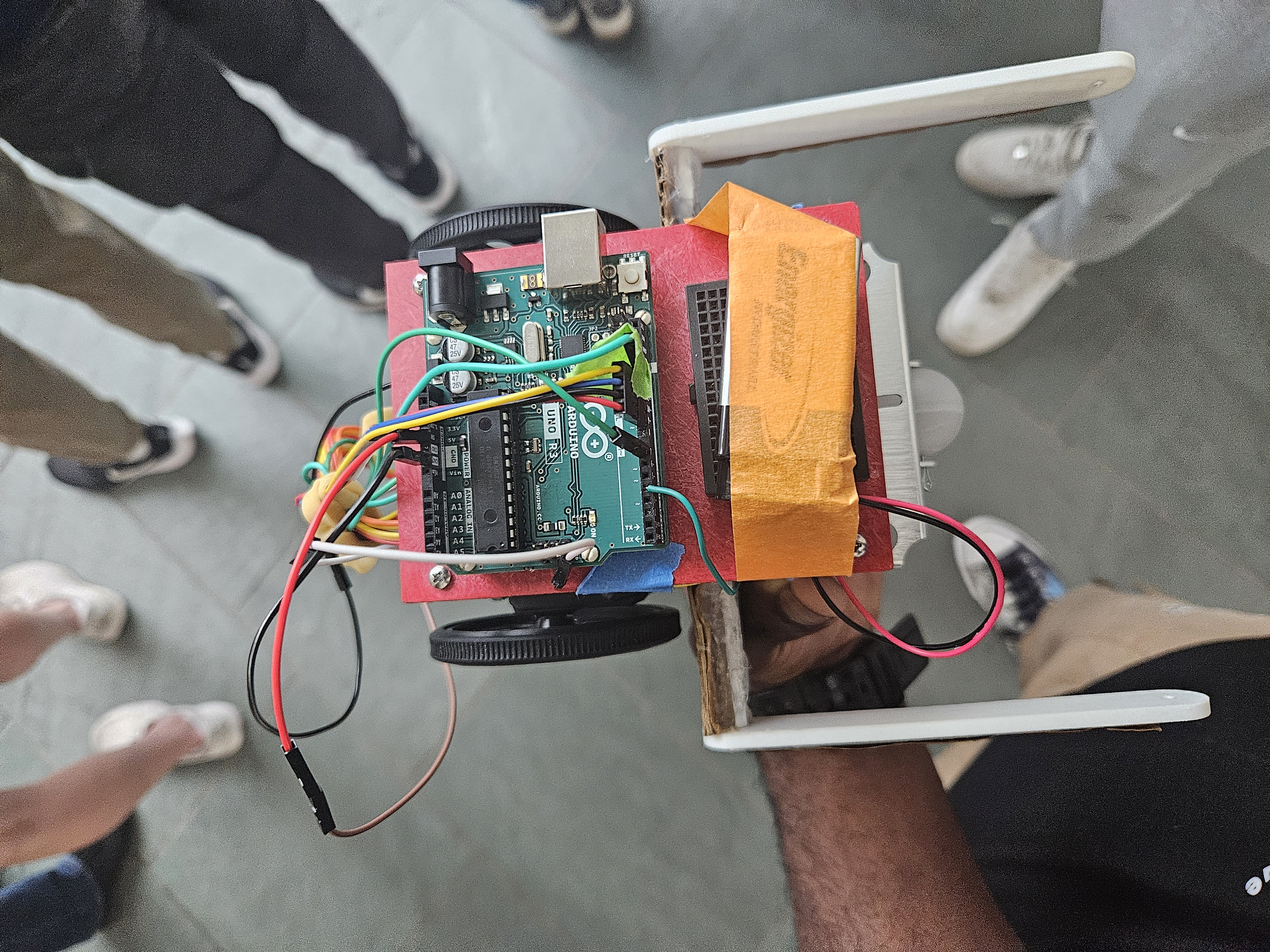
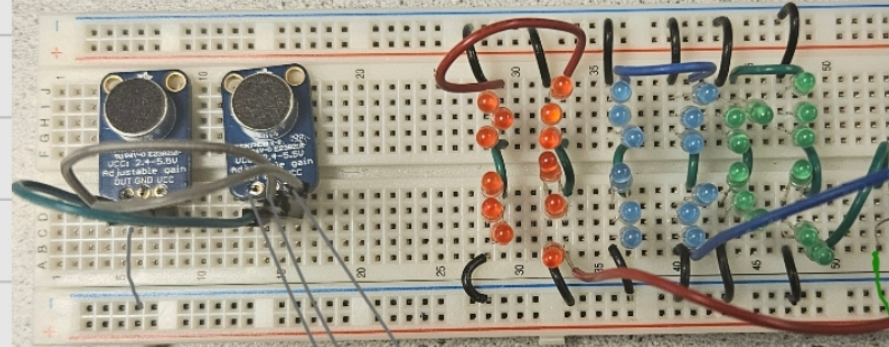
Cube Craze Robotics
I engineered and programmed an autonomous robot using an Arduino microcontroller and a custom chassis. The system utilized a two-wheel H-bridge motorized drive with QTI and TCS3200 color sensors for navigation and object detection. I designed and implemented the state-machine-based C/C++ code for autonomous operation, including line-following, color-based state transitions, and a strategic sweep-and-hoard mission.
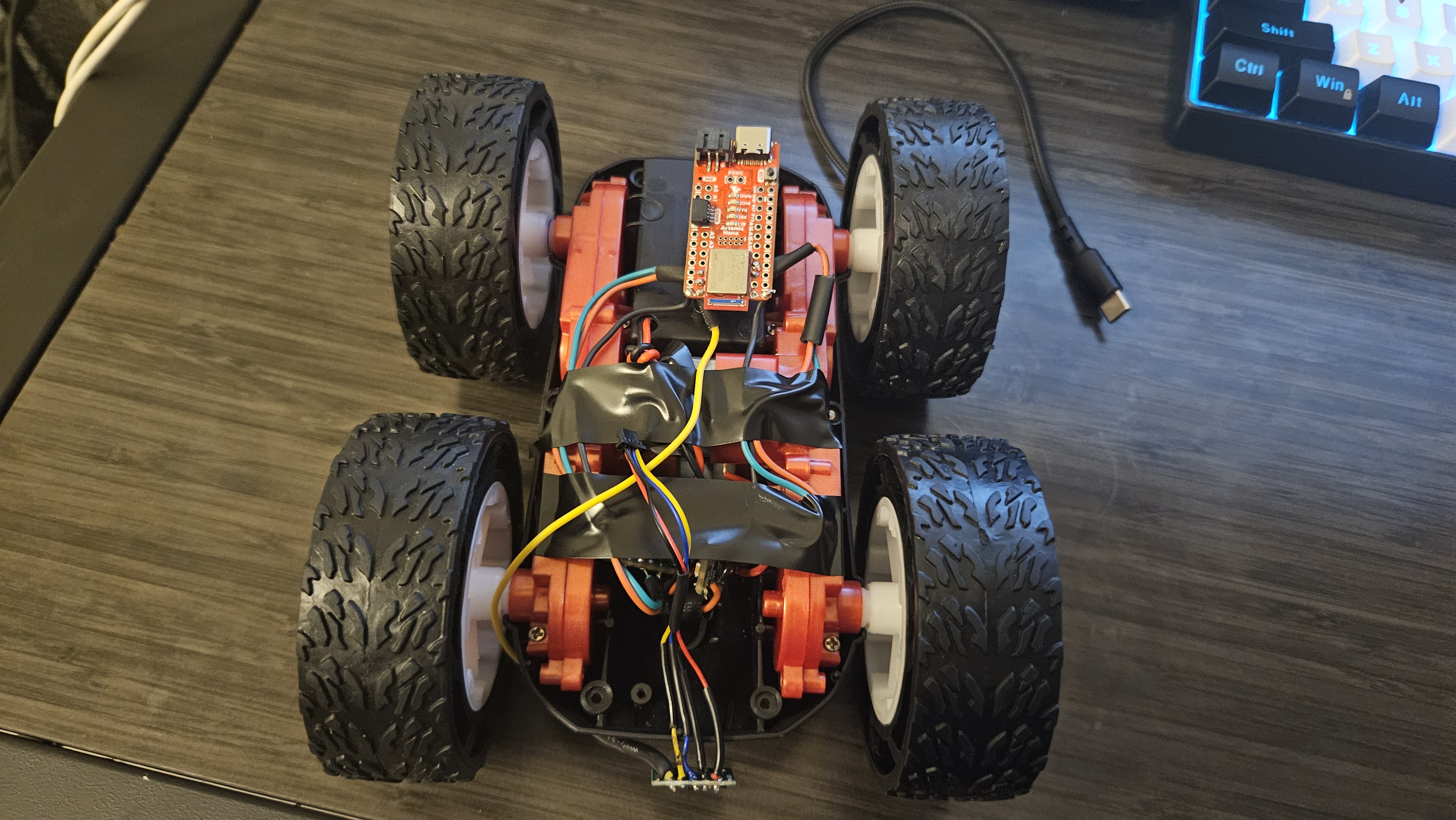
The SLAM car
This project involved building a small, autonomous RC car from the ground up, integrating various sensors and controls. The core of the work focused on implementing and fine-tuning PID controllers for both linear distance and angular orientation, allowing the robot to navigate a mapped environment, avoid obstacles, and perform specific stunts like a 180-degree turn. The final challenge involved combining these systems for full-route planning and execution.
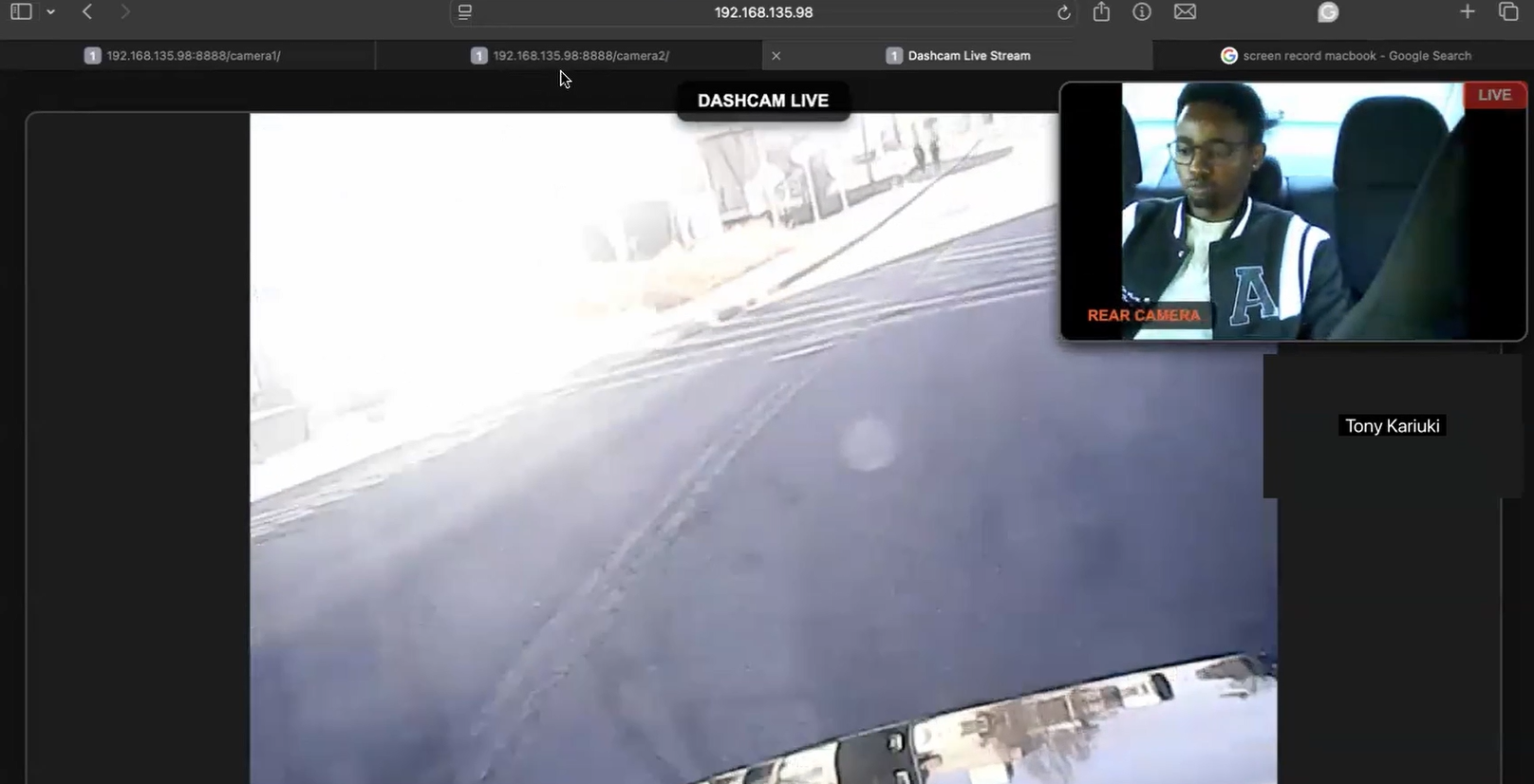
PiDash
Built a Raspberry Pi-powered dashcam system designed for high reliability and deep vehicle integration. The core of the work centered on implementing a two-way camera system where all OpenCV-captured footage was managed by a custom power management circuit to guarantee preservation even if the ignition was cut. Concurrently, a mediamtx server was configured to enable live, web-based video streaming. The final user experience involved integrating an intuitive Python pigame interface on an Adafruit touchscreen, which works in parallel to display critical live OBD-II stats (velocity, RPM, engine load) directly alongside the camera functionality.

Simulate my Controllers and 6DOF's!
This project describes all the challenges and steps I went through whilst simulating a robotic run (both robotic car and robotic arm implementations) in a virtual environment during my time in the ECE4770 Foundations of Robotics class. From an introduction to robotics as a whole, degrees of freedom and how they are measured to Klarman and Bayesian filters and the Ziegler Nichols Method for the estimation of PID and MPC controllers.
FPGA to your Heart
This project implements a heart rate monitoring system in Verilog and assembly on a simple processor. It counts heartbeat pulses from a sensor input, computes beats per minute over a fixed sampling window, and displays the result on a two-digit 7-segment display.